
PID kontrol ismini Oransal, Integral ve Turevsel kelimelerinin ingilizce karşılıkları olan Proportional, Integral ve Derivative kelimelerinin baş harflerinden alır.
PID kontrol endüstride robotik ve otomasyon sistemleri üzerine çalışanların çok sık karşılaştığı ve karşılaşacağı bir kontrol metodudur.
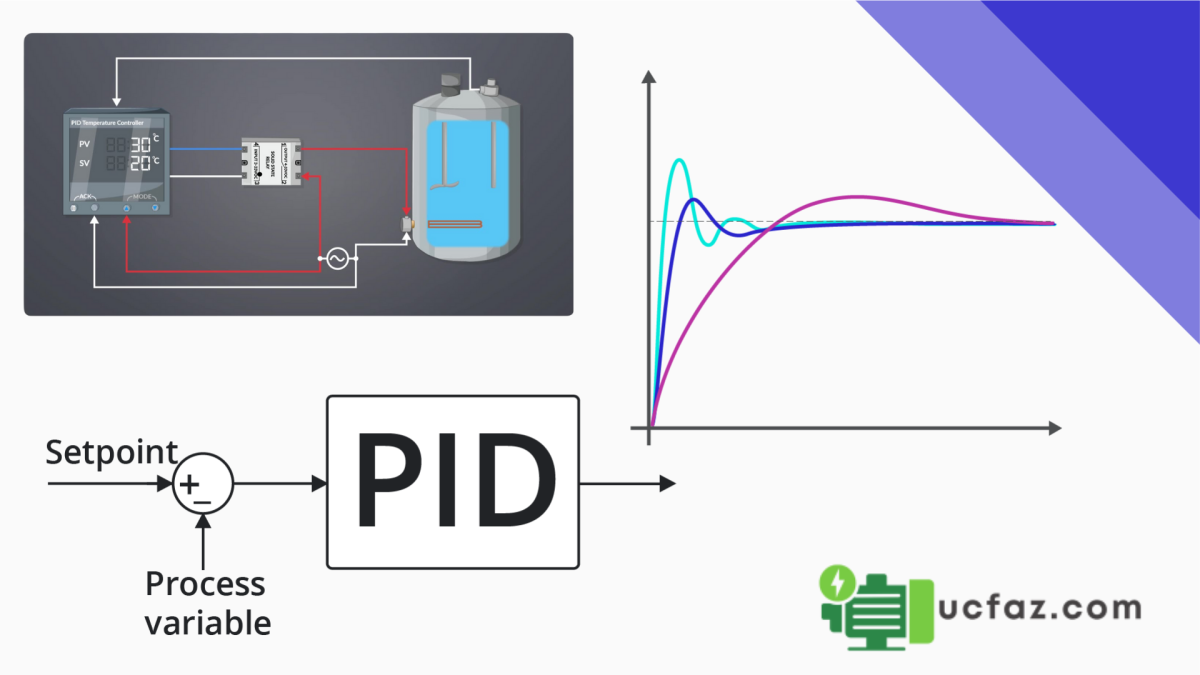
PID bir kontrol geri bildirim mekanizması diyebiliriz. PID Kontrolör’ün çalışma mantığını açıklamak gerekirse, bir sistemin çıkışını istenilen referans değerinde tutmak için kullanılan bir kontrol yöntemidir denebilir.
PID Kontrol Bileşenleri
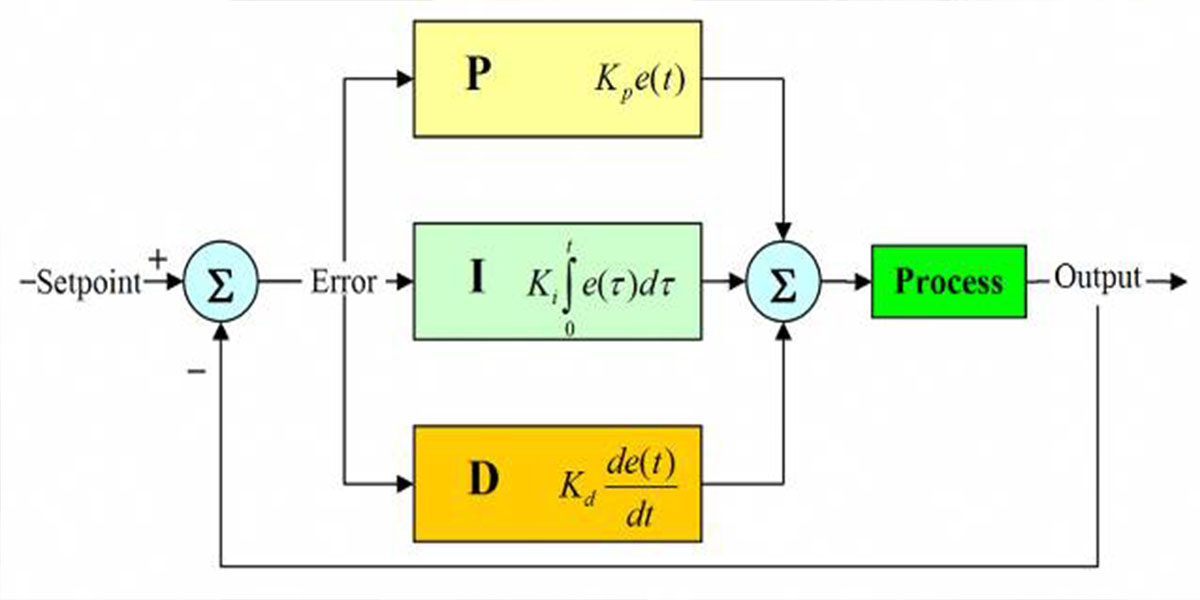
PID Kontrol, üç temel bileşenden oluşur.
- P(Proportional – Oransal): Hatanın büyüklüğüne tepki verme şiddetidir. Hata değeriyle doğru orantılı bir kontrol sinyali üretir. Yani hata ne kadar büyükse, kontrolcünün tepkisi de o kadar büyük olur. Hata sıfıra yaklaştıkça tepki azalır.
P = Kp * Hata
- I(Integral) : Zamanla oluşan hatanın alanını hesaplar. Sistem çalışmaya başladığı andan itibaren biriken hataların değeri ile orantılıdır. Her bir dt çevrimindeki hata katsayısıyla çarpılarak toplanır.
- D(Türevsel): Hatanın değişim hızına orantılı olarak tepki verir ve sisteme bir öngörü kazandırır yani, hatanın zamanla değişimine bakarak sistemin ilerleyen süreçte nasıl davranacağını, hatanın ne yönde gideceğini tahmin ederek sistemin aşırı tepki vermesini önler.
PID Kontrolde Hata Kavramı
PID kontrolde hata, referans değer ile feedback sinyali arasındaki farkımızdır.
PID Kontrol Uygulama Örnek
Örnek üzerinden açıklamak gerekirse motor sürücü sistemlerinde bir motorun hız kontrolünü yaptığımızı varsayalım.
Motor hız referansımız 1500 RPM olsun. Yani,
Referans(setpoint): 1500 RPM
Gerçek Değer: Motor hızımızı ölçen encoder olduğunu varsayalım ve encoderden alınan değerin 1480 RPM olduğunu varsayalım.
Motor hız kontrolünde referansımız 1500 RPM iken feedback sinyalimizde 1480 RPM’de döndüğünü görüyoruz ve 20 rpm bir hata mevcut. Oransal kazanç katsayımız Kp’yi 0.5 olarak ayarladığımızı varsayalım.
Pçıkış= 0.5 x 20 = 10, yani P kontrolcüsü bu 10 birimlik düzeltme sinyali üretir ve sürücüye gönderir. Yani P Kontrolcüsü hataya anında ve orantılı bir tepki üretir.
P çıkışından üretilen tepki sonucunda 1490 RPM hıza ulaştı ve orada kaldığını varsayalım. Yani 10 RPM’lik küçük ama sürekli bir hata var demek oluyor. İntegral bileşeni bu hatayı toplar ve sürücüye ek düzeltme sinyali gönderir.
Motorun hızı hızla artıyorsa (örneğin 1300 → 1450 → 1600 rpm), D bileşeni bu artışı fark eder ve kontrol sinyalini azaltarak motorun hedefi aşmasını önler.
Özet olarak bakacak olursak,
| Bileşen | Görevi | Etkisi |
| P | Anlık hataya tepki verir | Hızlı cevap sağlar |
| I | Geçmiş hataları toplar | Kalıcı hatayı sıfırlamaya yönelik hareket eder |
| D | Hata değişim hızını dikkate alır | Salınımları azaltır, sistemi kararlı olması için çalışır |
AC Motor Sürücüsü Nasıl Çalışır? | VFD Prensibi, Yapısı ve Uygulaması 2025
PLC ile PID Kontrol Kontrol Nasıl Yapılır Uygulama Örneği
Konu ile alakalı güzel bir eğitim videosunu sizlerle paylaşıyorum